
- 作者:老汪软件技巧
- 发表时间:2024-11-19 17:02
- 浏览量:
1.简介
机器学习中,进行模型训练之前,需对数据做归一化处理,使其分布一致。在深度神经网络训练过程中,通常一次训练是一个batch,而非全体数据。每个batch具有不同的分布产生了internal covarivate shift问题——在训练过程中,数据分布会发生变化,对下一层网络的学习带来困难。Batch Normalization将数据规范到均值为0,方差为1的分布上,一方面使得数据分布一致,另一方面避免梯度消失。
2.计算
如图所示:
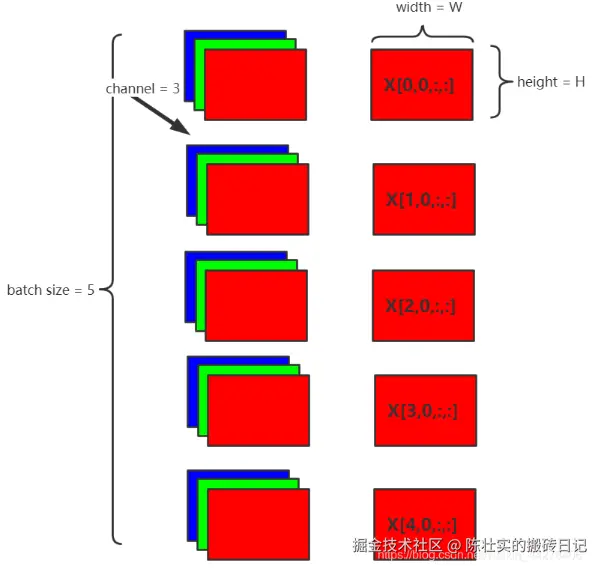
上为输入数据,其shape=[5, 3, h, w]
Step1: 计算同一通道下的均值,如图中的红色图块,均表示同一通道

Step2: 计算同一通道下的方差,如图中的红色图块,均表示同一通道

Step3: 对当前通道下的每个数据做归一化

其中的x表示具体的一个点,如x = X[0][0][0][0][0]这个数据点。
Step4: 增加缩放和平移变量γ\gammaγ和β\betaβ, 归一化后的值为
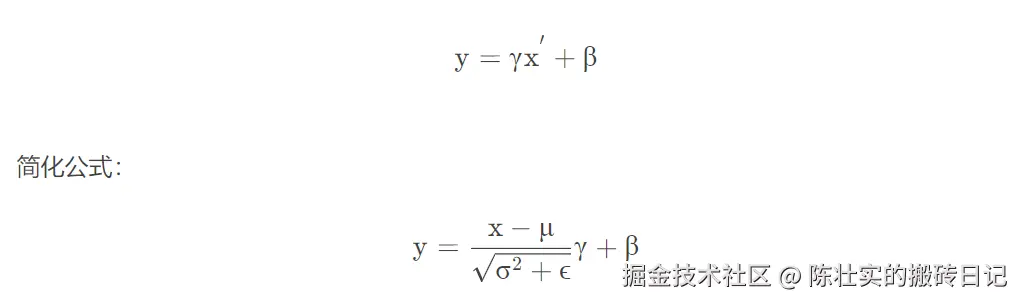
其中,ϵ\epsilonϵ是一个设置的常量,默认为1e^-5,其作用是防止除0。γ\gammaγ和β\betaβ这两个参数一般情况也不需要我们管(如果,参数affine=true, 就需要我们给定)。
3. Pytorch中的nn.BatchNorm2d()函数的解释
其主要需要输入4个参数:
(1)num_features:输入数据的shape一般为[batch_size, channel, height, width], num_features为其中的channel;
(2)eps: 分母中添加的一个值,目的是为了计算的稳定性,默认:1e-5;
(3)momentum: 一个用于运行过程中均值和方差的一个估计参数,默认值为0.1.
(4)affine:当设为true时,给定可以学习的系数矩阵γ\gammaγ和β\betaβ
4.代码示例:
import torch
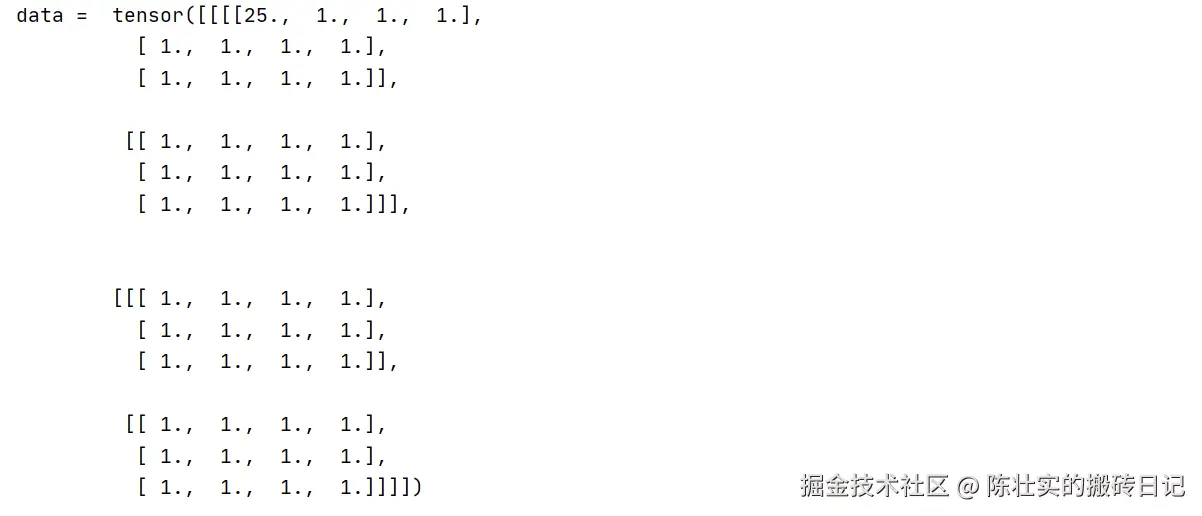
data = torch.ones(size=(2, 2, 3, 4))
data[0][0][0][0] = 25
print("data = ", data)
print("\n")
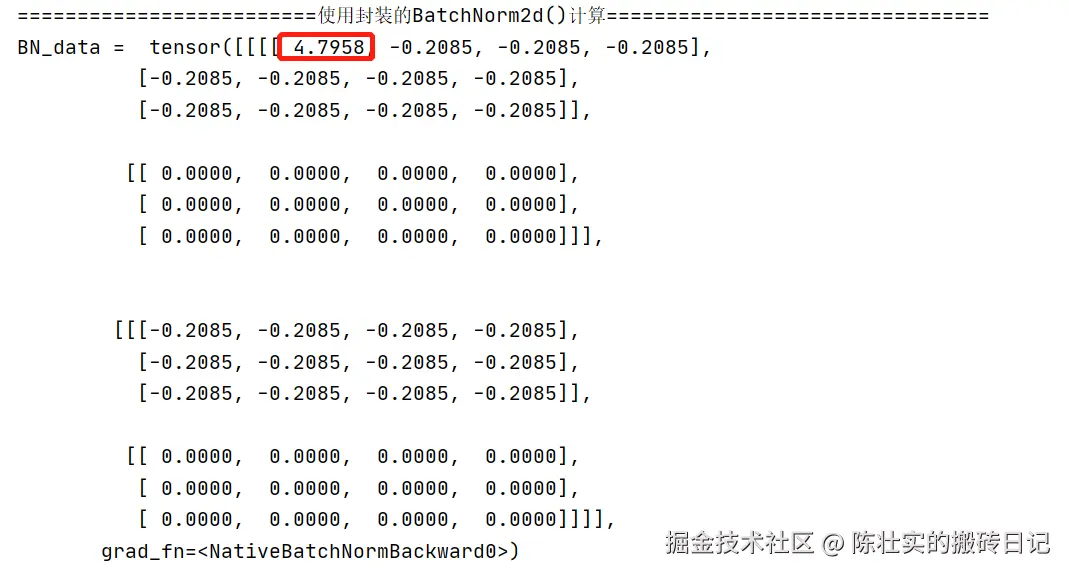
print("=========================使用封装的BatchNorm2d()计算================================")
BN = torch.nn.BatchNorm2d(num_features=2, eps=0, momentum=0)
BN_data = BN(data)
print("BN_data = ", BN_data)
print("\n")
print("=========================自行计算================================")
x = torch.cat((data[0][0], data[1][0]), dim=1) # 1.将同一通道进行拼接(即把同一通道当作一个整体)
x_mean = torch.Tensor.mean(x) # 2.计算同一通道所有制的均值(即拼接后的均值)
x_var = torch.Tensor.var(x, False) # 3.计算同一通道所有制的方差(即拼接后的方差)
# 4.使用第一个数按照公式来求BatchNorm后的值
bn_first = ((data[0][0][0][0] - x_mean) / ( torch.pow(x_var, 0.5))) * BN.weight[0] + BN.bias[0]
print("bn_first = ", bn_first)
运行结果:
(1)原数据
(2)使用BatchNorm()函数
(3)自行计算批归一化的值
图中标红的两个框数据完全相等,完结撒花!!!
注:有借鉴该篇文章



